Walker Ver2.0
This is my first walker. I don't remember many details about it because it was canabalized
for parts (motors) long ago. It is powered by a good old four neuron microcore and a
74HC245 motor driver. The asthetics aren't the
greatest but this walker was meant as a proof of concept for me and nothing more.
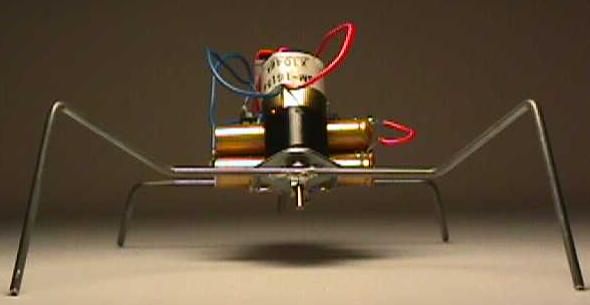
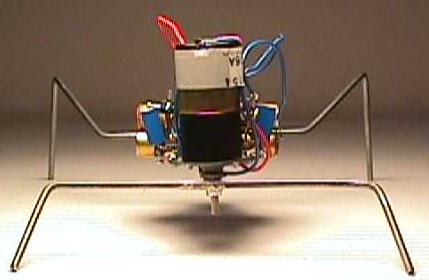
Looks rather menacing doesn't he.
Leg geometry is very important but
leg symmetry is more important. Experiment to find the best geometry for your walker. My
general starting point is 45 degrees from the center point and I try to make the walker
low to the ground to lower the center of balance. Placing the walker on some graph paper
can help you acheive symmetry. The feet contact points have to be the same distance and angle
from the body or your walker will limp. The legs don't have to be identical as long as the
contact points are.
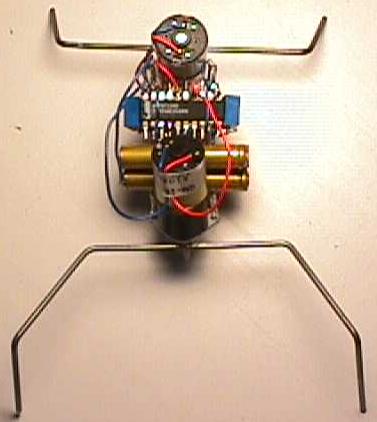
The blue potentiometers are used to
adjust the drift of the legs
The spring is attached to both
legs to aid in centering them when they fall out of proper gait.
The "Moon" shot
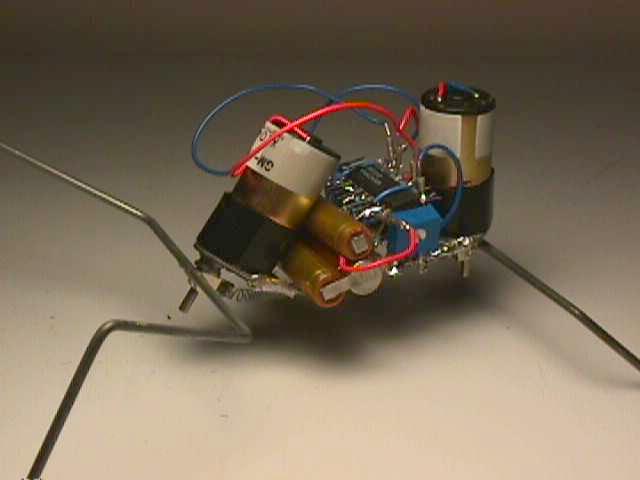
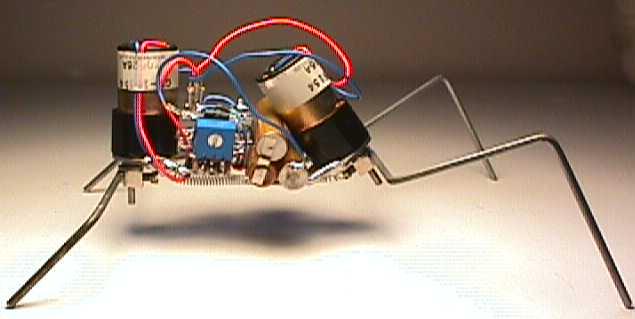
The chassis is made from
jumbo paper clips and the legs from coat hanger wire. The legs are attached with the little
metal thingies pulled from bigger plastic thingies (i think they are called terminal blocks).
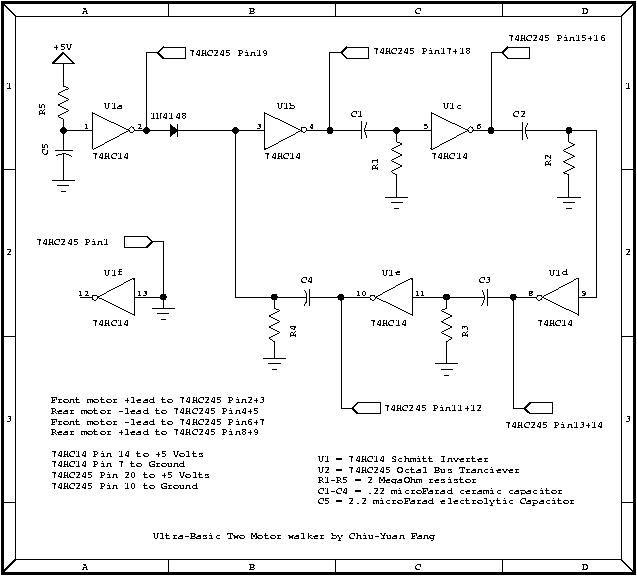
The schematic. It's not very
complete or up-to-date. Click here for an updated schematic.
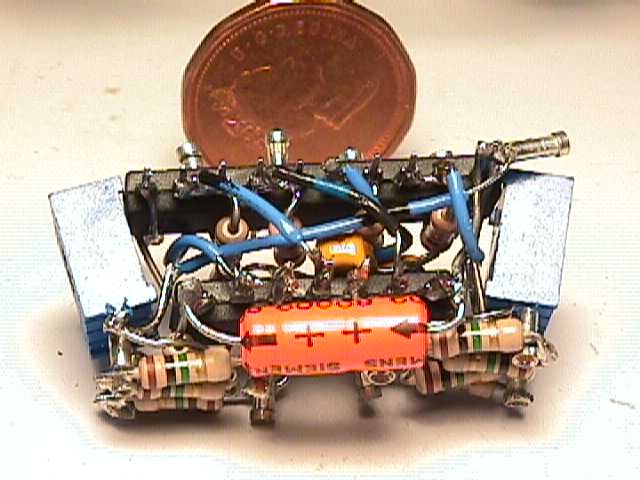
Micro-core Alpha 1.0
The microcore brain with PNC and 74HC245 Driver. The connectors are just pins pulled from a
DIP socket.
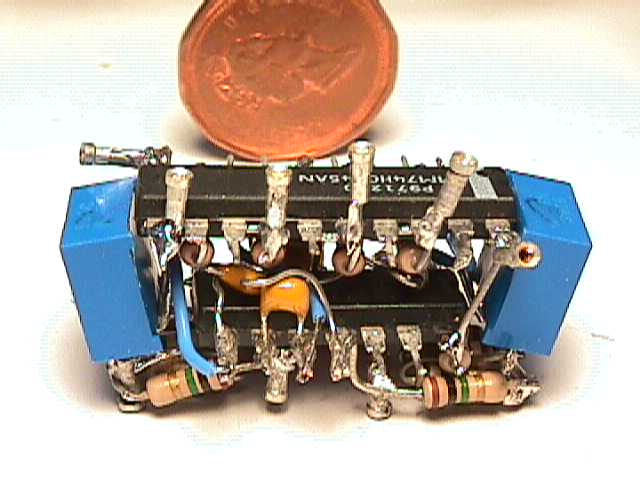
I built the brain with the free
forming method. Just solder the leads to each other to make connections. Watch for shorts
though.
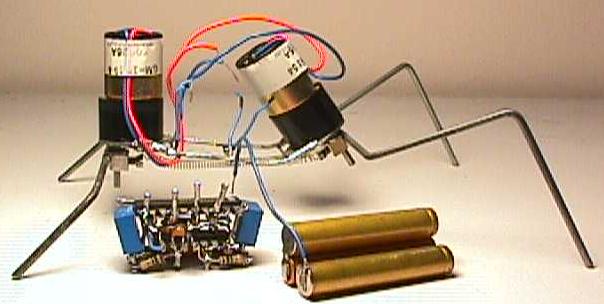
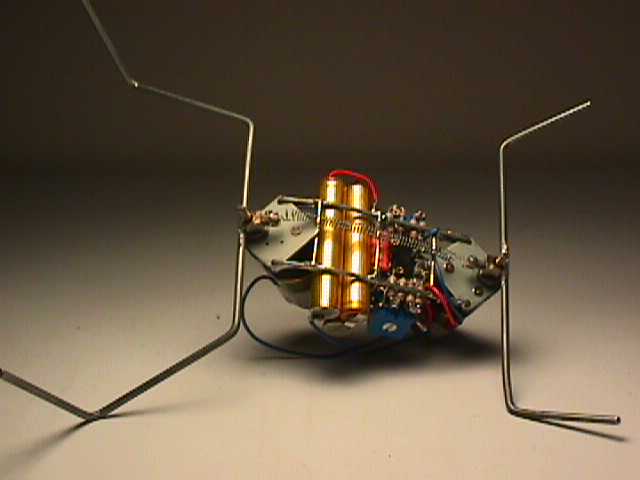
The walker dissected. The
battery pack is from half a 9Volt battery.
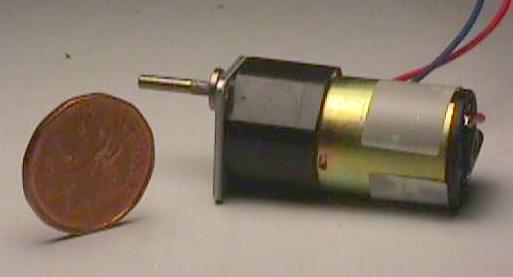
BG Micro lense motors. Good torque,
excellent efficiency, very cheap, perfect for walkers...and not available anymore last I
heard. =(
Page Two
Beam Table of Contents