Walker Ver2.2
This is my 3rd two motor walker and my reigning champion. It's definitely my favorite two motor design so far.
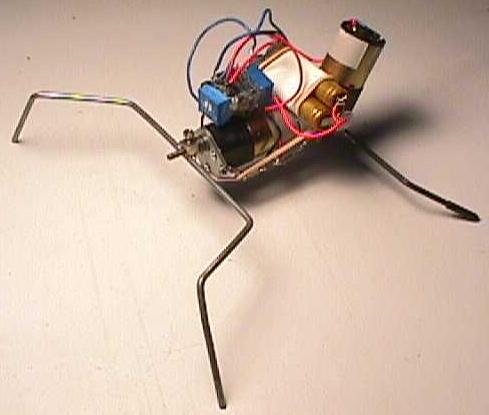
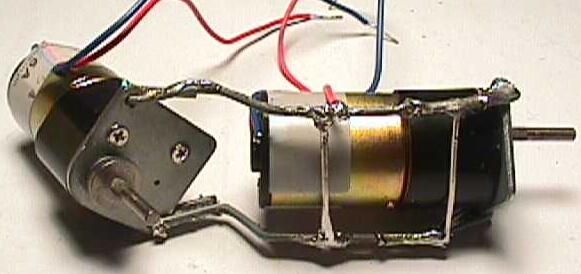
The motor orientation is from one of
Tilden's bots on Robots Rising. It works very well.
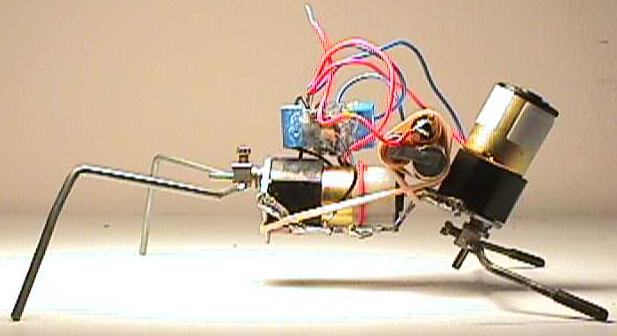
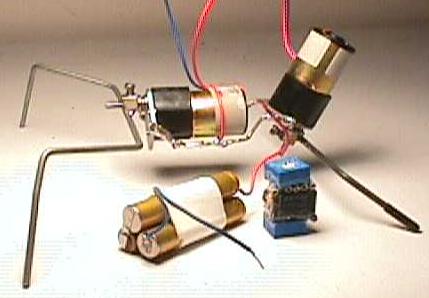
The front motor should be flipped over.
Careless mistake while building =(. With the front motor shaft higher up, balance is better but the
bottom half of the motor occasionally gets caught on obstacles.
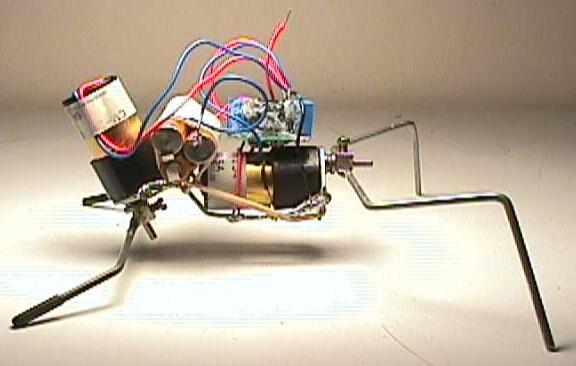
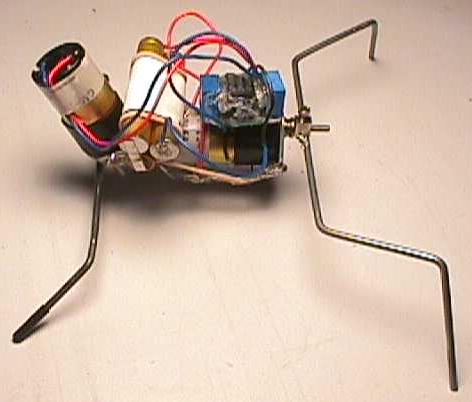
Good shot of the motor orientation.
The brain is held in place with a
loop of wire and the battery pack is anchored with an elastic band. Not very aesthetic but it works.
With this setup, the front legs just
lift to clear object in the walkers path. They have no driving force.
The rear legs have all the power in the
stride. Compared to Walker Ver2.0, Ver2.2 has better climbing ability, better stability/balance and
much better turning ability (more to come on added sensors), the only drawback is ver2.2 has a
smaller step therefore it's a tad slower. It also stays in gait much better than ver2.0 because
(I think) gravity acts to stabilize both motors due to the vertical component of their orientation.
A leg that sweeps horizontal isn't affected by gravity and must get feedback from some other means
ie. centering springs and end-stops.
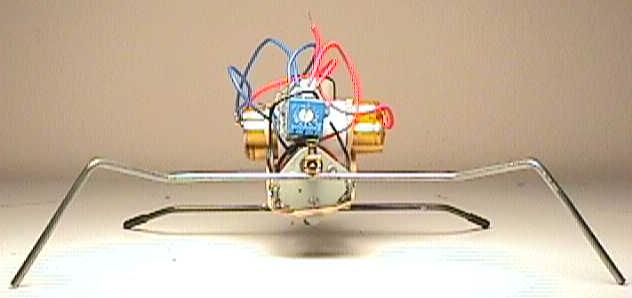
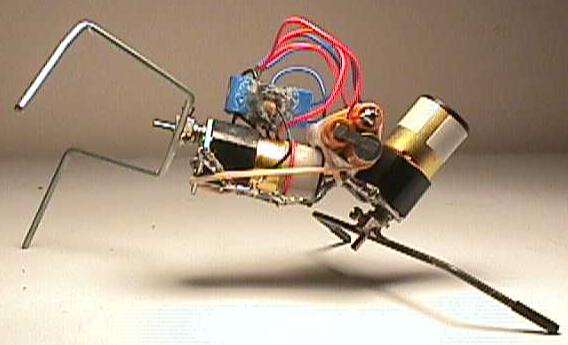
I rarely see this walker flip
it-self due to it's very low center of gravity and it's wide leg span.
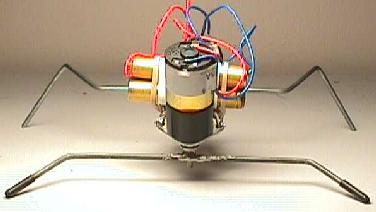
The "Moon" shot.
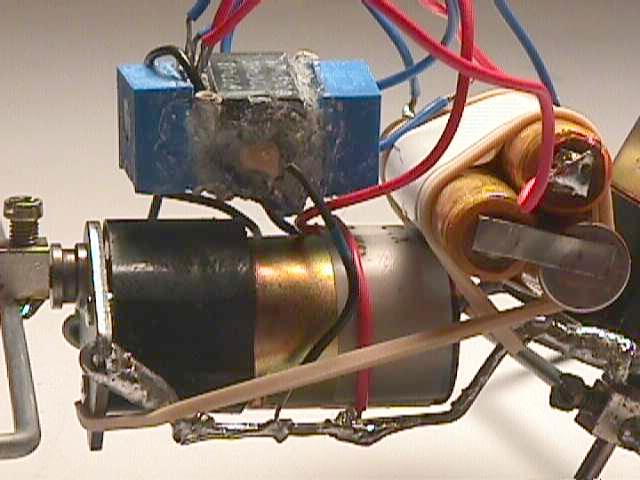
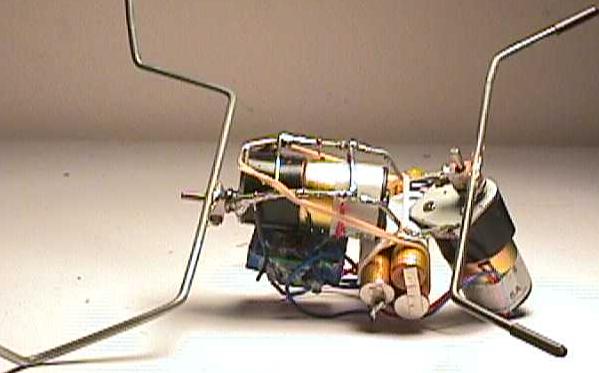
A close-up of the guts.
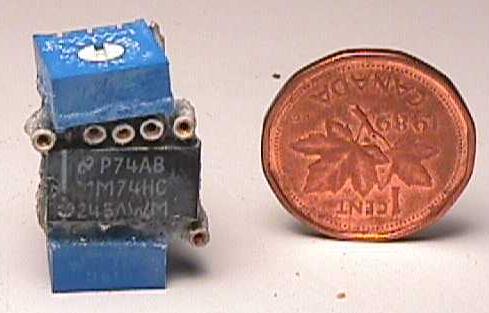
80% of the brain is made from surface
mount components. Actual dimensions are 20mm x 10mm x 10mm. The assembly contains the microcore,
PNC and 74HC245 motor driver. Two of the 245's buffers ganged together can drive one of the super-
efficient BG Micro motors which really surprised me coming from a surface mount device.
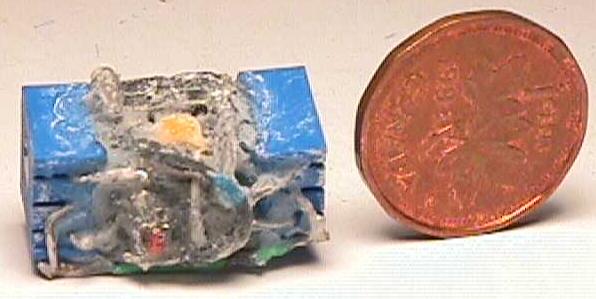
The white crud is epoxy. The
free-form surface mount assembly is very fragile and the part that breaks is always right in the
middle (Murphy's Law) so after a couple surgical reconstructions, I decided to fill it in with epoxy.
Now it's as strong as a rock.
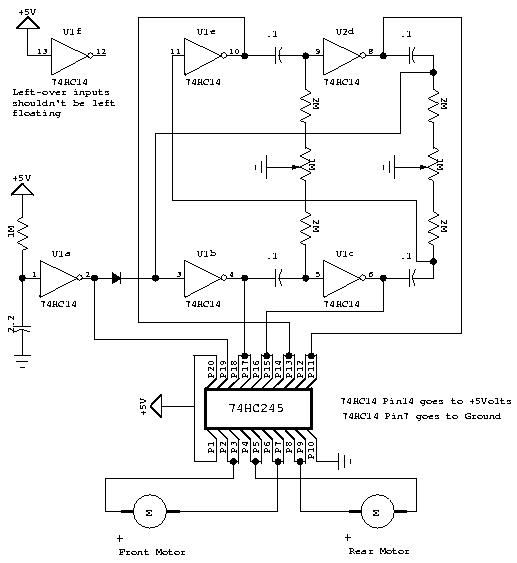
Walker Ver2.2 schematic.
Correction:
Pin 1 on the 74HC245 should be attached to ground instead of positive. Extremely sorry for the confusion.
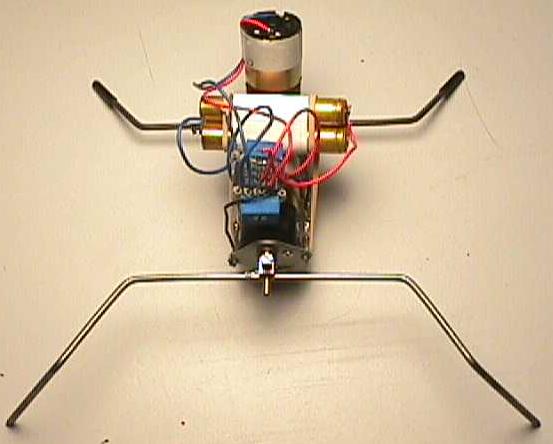
Walker Ver2.2 dissected.
The frame is made from jumbo paper
clips. AT the time this picture was taken, it wasn't very strong but I have since then added
stiffening spars. Try to make your walker frames as stiff as possible.

The legs are made from coat hanger wire
and attached using the metal pieces from terminal blocks in the same manner as Ver2.0.

This is the max height that this
walker can consistently climb over. It can do higher but not every time.
Beam Table of Contents