Walker Ver3.0
Three motor designs are much more able walkers with longer strides and very tall steps. They
are also a huge jump in construction complexity from a two motor walker. Walker Ver3.0 is
controlled by a six-neuron nervous net. I opted not to go with the 4 neuron microcore to
reduce complexity. That sounds strange but take my word for it. Ver3.1 (in the works) will
have a microcore, I'll post the comparisons.
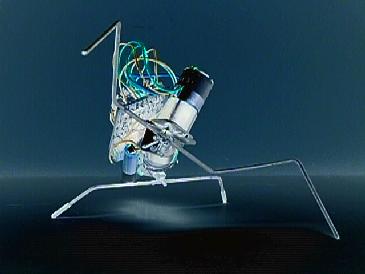
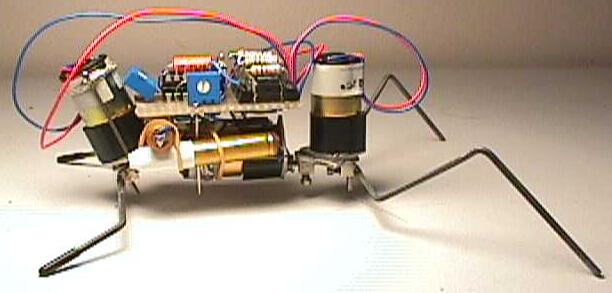
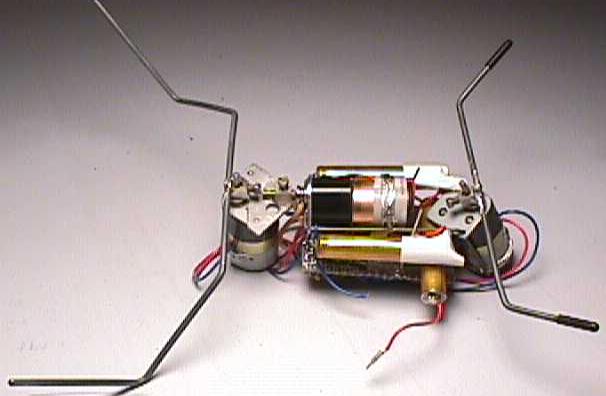
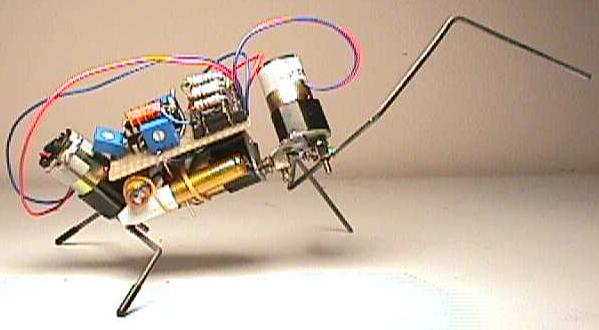
Motor orientation. The waist (middle)
and front motor are at 90 degrees to each other and the rear is tilted back to give it some
lifting force as well as driving force.
The legs are stolen from Walker
Ver2.0 (I'm lazy =). They are spread out more and reshaped.
I had to lower it as much as possible
to increase stability. This walker is quite top heavy and with it's huge leg travel, it could
flip itself very easily. Lowering the center of gravity helped a lot.
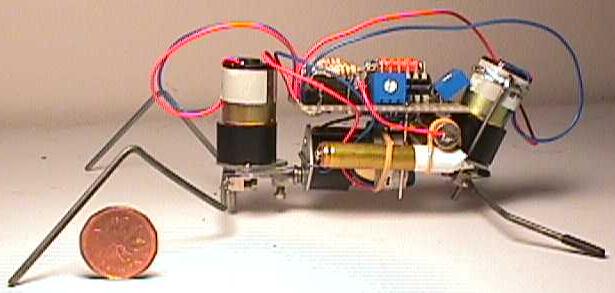
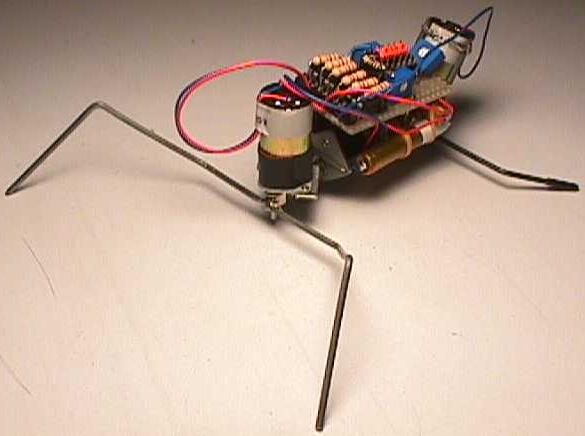
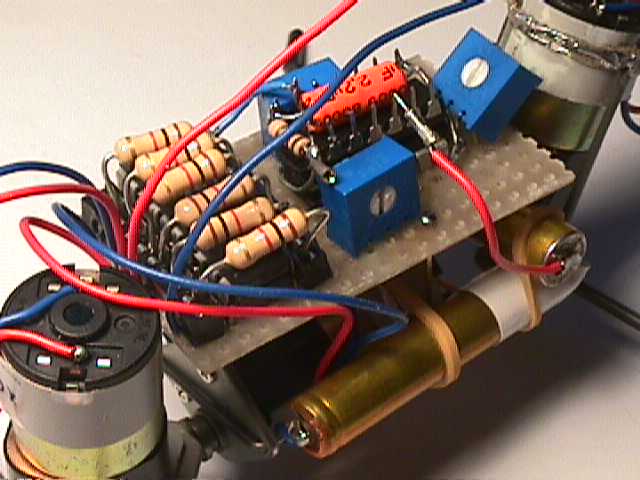
Again, the batteries are held in
place with elastics and the wires are left hanging...What does the A in BEAM stand for again?
Heat shrink was added to the
rear feet to add traction.
When I first finished Walker
Ver3.0 it always turned to the right. No matter how I tuned it, it wouldn't walk strait.
After much head pounding I figured out the problem. I grinded off the burrs on one of the
front feet but forgot to on the other. As soon as I grinded the other foot, it walked
strait as an arrow.
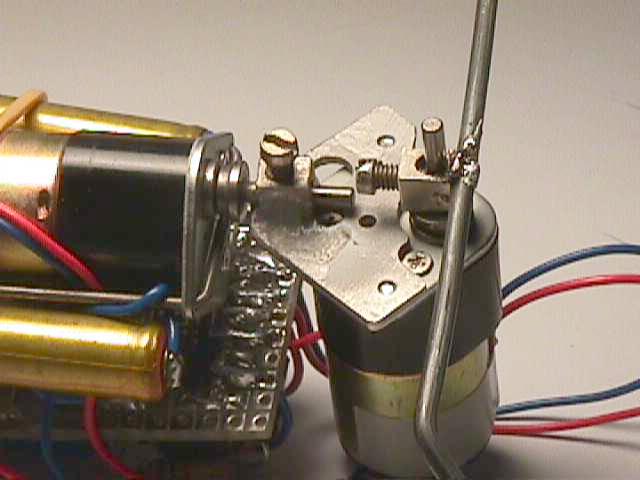
Here you can see the collars pulled
from terminal blocks that I use to mount legs to motors. Joining the front motor to the
waist motor was the hardest part of construction. I cut little grooves into the mounting plate
and collar, sanded the contact points then caked on the epoxy. The result is a very strong
joint that has lasted the abuse that all my walkers go through.
The frame on this walker (and most
of my others) is electrically grounded. One of the problems I had was the rear leg would come
into contact with one of the battery terminals, interrupt the supply and reset the nervous
net. I corrected that with a little electricians tape.
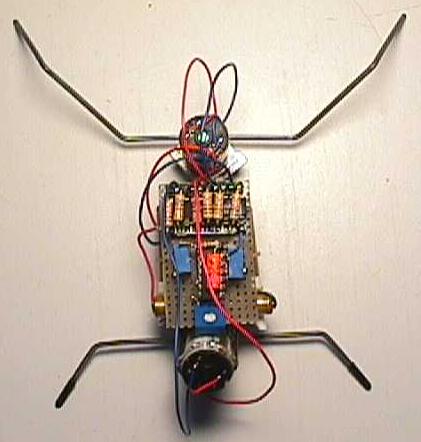
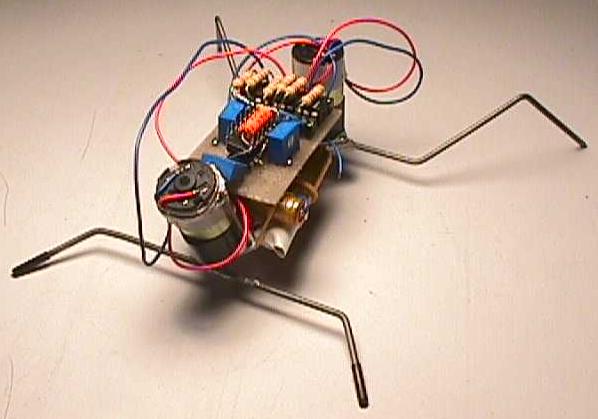
The brain has 6 neurons which
takes up an entire 74HC14. I had to add an extra chip just for the PNC. I will use the extra
schmitt inverters for sensors. I discovered that reversing is very easily implemented with
3 motor walkers...just reverse the waist motor and that's it.
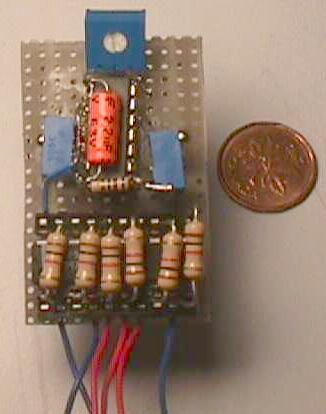
It isn't my smallest design and it
sure ain't the prettiest but working with veroboard sure is easier than freeforming. The
potentiometers are for drift adjustment and the resistors plugged into the socket go across
the 74HC245 motor driver. I used a socket so I could experiment with different feedback
resistors.
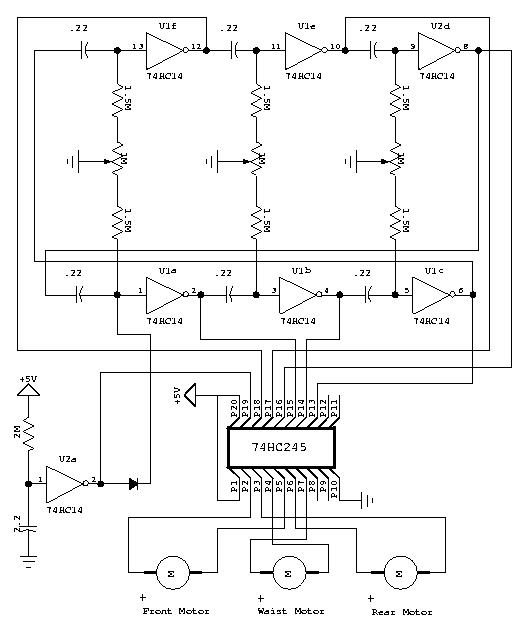
The schematic.
Correction: Pin
1 on the 74HC245 should be connected to ground instead of +5V.
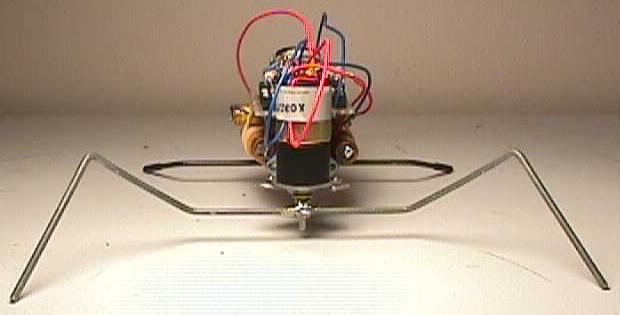
3 motor walkers have incredible
stepping height and stride length.
Page Two. The walker walking.
Beam Table of Contents