Walker Ver5.3
I'm now on my third generation five motor walker and I think I've ironed out all the wrinkles.
This walker is absolutely incredible to watch and it pushed me through the barrier between
building BEAM toys and building a true robotics research platform. Here's a couple preliminary
pics.
This is an earlier picture of
Walker 5.3. Just the basic control circuitry and drivers without any sensors.
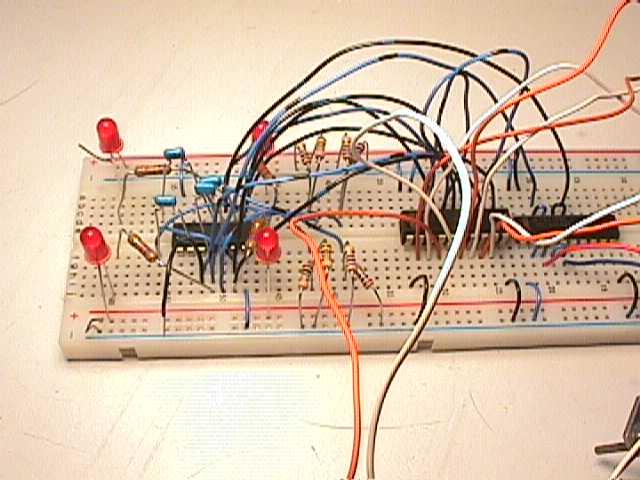
And here's a close up of the bread
board.
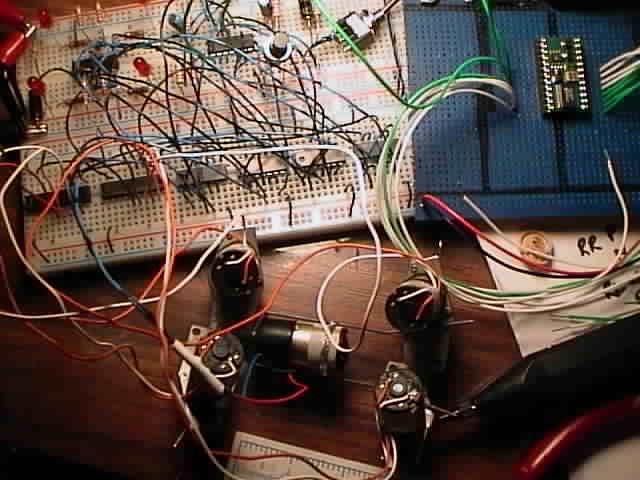
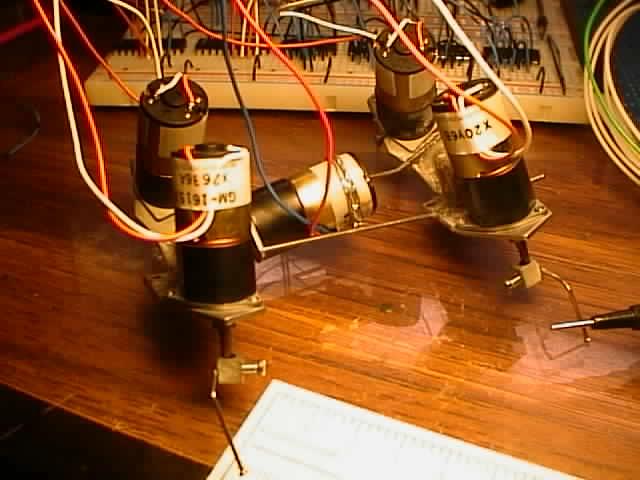
This is the complete birds eye view of
things as they look now. The bread boards holds the microcore, drivers, nu neurons and motor
multiplexers. The board on the right holds a Basic Stamp II which will eventually attach to a
low-resolution vision system. I'm just experimenting with influencing the microcore with the Stamp.
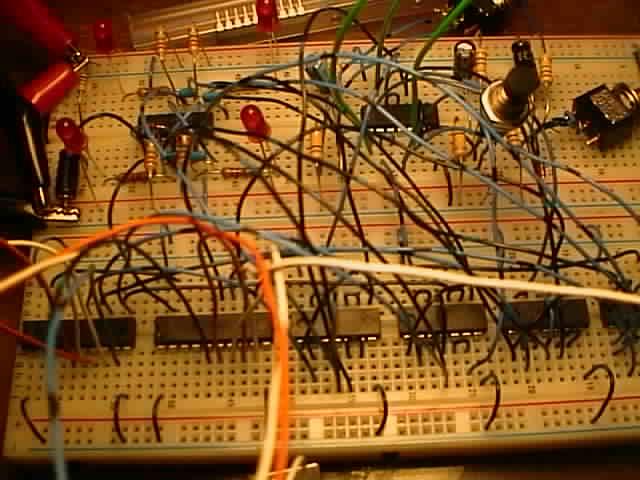
Close up of the bread board. Microcore
in the top left corner, nu neurons in the top right corner, multiplexers in the bottom right
corner and the motor drivers in the bottom left corner...what a mess!!!
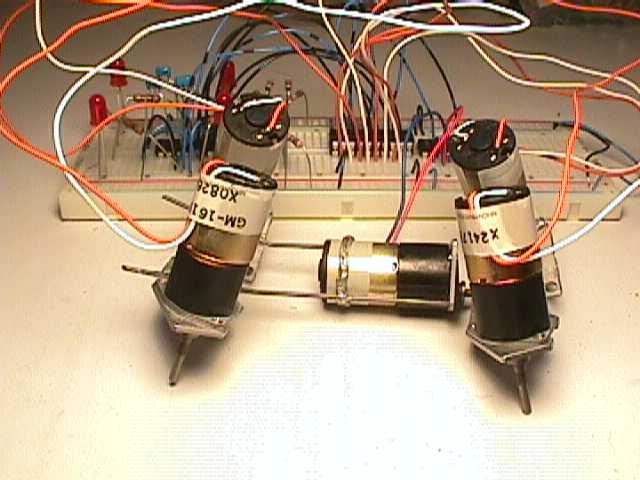
The frame has been the big headache on
this walker. The mechanics are so critical for it to walk efficiently. It took me three trys to
get it right and I'm still not 100% satisfied...I'm going to make the legs a bit longer and reduce
the angle that the front motors lean back.

Here's the schematic. Missing a ground
on pin 10 of the second 74HC245. Touch switches go between the 100K ohm resistor and the input
junction. The middle Nu is currently unused. It will be used for waist reverse in the future.
4016's are analog CMOS switches. U2b-input is pin 3, output is pin 4.
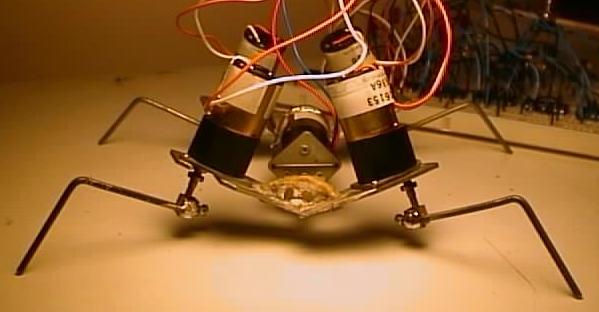
Finally, a set of legs that I'm satisfied
with!
This is an AVI movie of Walker Ver5.3 turning after the touch switch is triggered.
walk5.avi
(4.73Mb).
Here's the same movie in RealVideo format (not working right now). Arghh, I give up. If anyone
has experience with creating Real Video format clips and is willing to help me, please
E-mail me. Thanks.
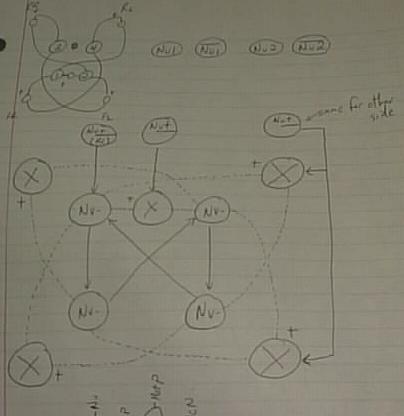
The topology.
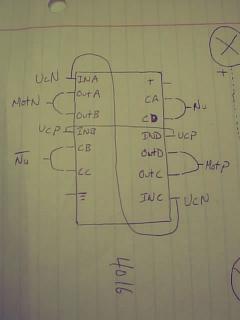
Multiplexer layout for the 4016 chip.
Data-sheet is on this page.
More to come...eventually...
Back to BEAM Table of Contents